一、配置
1、opencv
#安装依赖
1 | sudo apt-get install libvtk5-dev |
#安装OpenCV 2.4.13
1 | git clone https://github.com/opencv/opencv |
注:opencv的下载过程非常慢
2、dlib(GPU版)
需要提前安装驱动、cuda 与 cudnn
进入官网:http://dlib.net/ ,点击左下角Download dlib ver.19.17 ,下载后解压。
进入dlib根目录下
1 | mkdir build && cd build |
注:会自动检查满足安装gpu版条件,注意命令行提示信息
二、Kinect v1接入
1、安装OpenNI2
1 | git clone https://github.com/occipital/OpenNI2.git |
2、安装libFreenect
1 | git clone https://github.com/OpenKinect/libfreenect |
打开libfreenect/CMakeLists.txt,在33行cmake_minimum_required(VERSION 2.8.12)下一行添加
1 | add_definitions(-std=c++11) |
保存后关闭,命令行继续执行
1 | mkdir build && cd build |
注:${OPENNI2_DIR}是OpenNI2的解压文件夹,比如我的在ElasticFusion文件夹,则
打开libfreenect文件夹,运行
1 | sudo cp platform/linux/udev/51-kinect.rules /etc/udev/rules.d |
重启后,插上kinect后,命令行运行clsusb,查看是否包含:Xbox camera,Xbox motor,Xbox audio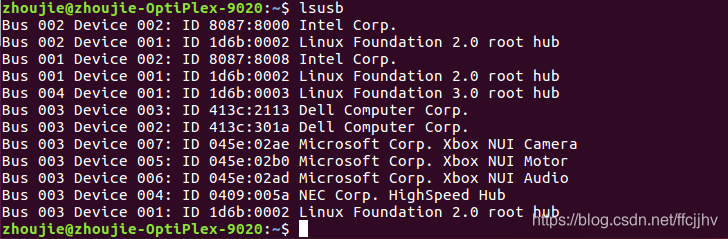
二、代码运行
1、CMakeList.txt修改
#CMakeList.txt
1 | cmake_minimum_required(VERSION 2.8.4) |
将OPENNI2_PATH与dlib路径修改为自己的。
2、数据+模型下载
下载 shape_predictor_68_face_landmarks.dat 和 dlib_face_recognition_resnet_model_v1.dat 放置到model文件夹中
链接:https://pan.baidu.com/s/1jIoW6BSa5nkGWNipL7sxVQ
其中包括:
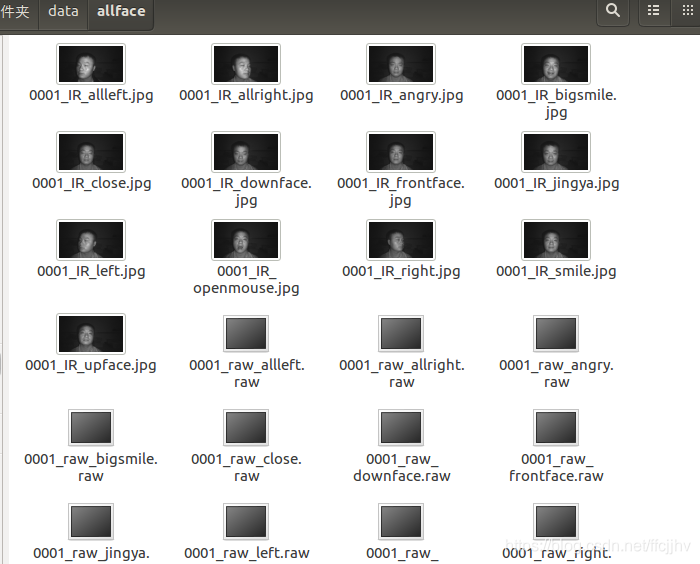
- candidate-face.zip(人脸库:包含29个正面人脸红外图)
- allface.zip(测试人脸集:包括29个人,每人13种脸部姿态下的红外图与深度图)
- shape_predictor_68_face_landmarks.dat(人脸68关键点检测器)
- dlib_face_recognition_resnet_model_v1.dat(人脸识别模型)
3、代码运行
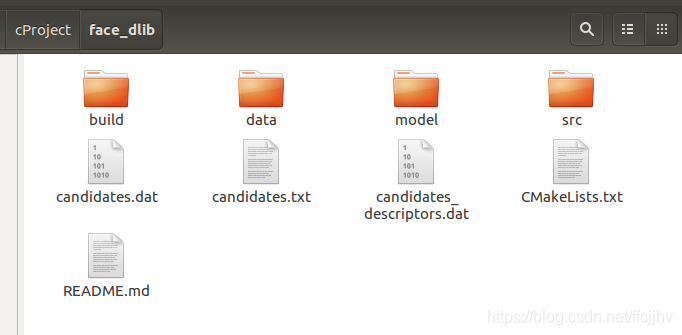
将train_candidate.cpp 、this_is_who 和 this_is_who_kinect_one.cpp置于src文件夹中。
#build
1 | mkdir build && cd build |
cmake时检查是否适用dlib(GPU)版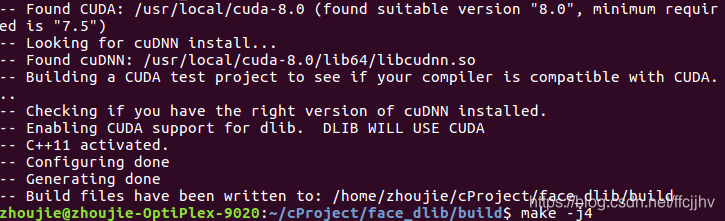
最终在build文件夹中生成多个可执行文件
将人脸图片重命名为人的名字,放在data文件夹中。
1、运行train_candidate 获得人脸库特征信息,存储在candidates_descriptors.dat 与 candidates.dat 中,同时生成candidates.txt,便于查看候选人信息。每次修改人脸库,只需运行train_candidate,完成人脸信息的更新。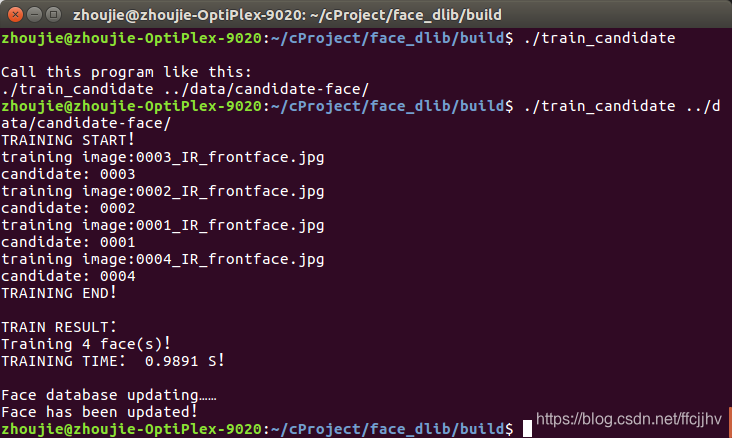
2、运行this_is_who_kinect_one,实时获取Kinect深度图与彩色图,并进行人脸识别与活体检测。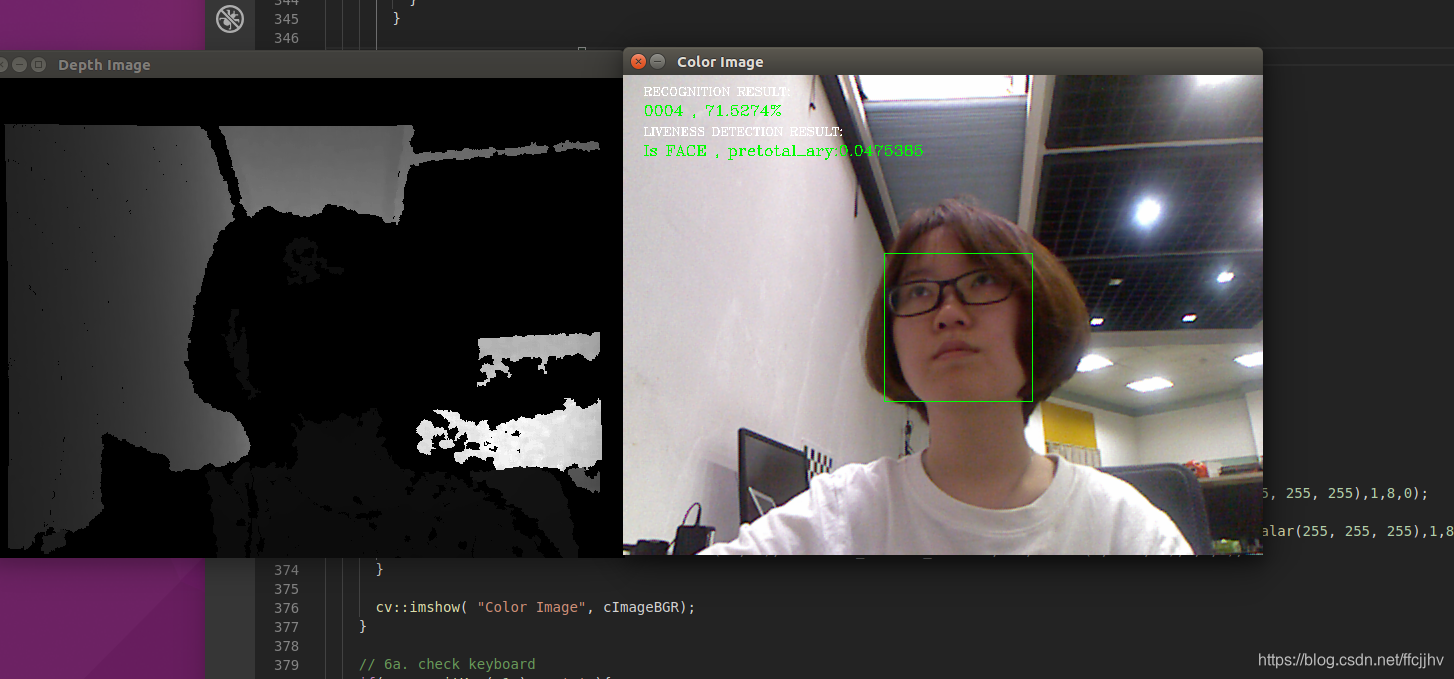
3、 不使用kinect v1实时接入,在离线数据上测试,运行this_is_who,使用data/allface中的深度图与红外图,并进行人脸识别与活体检测。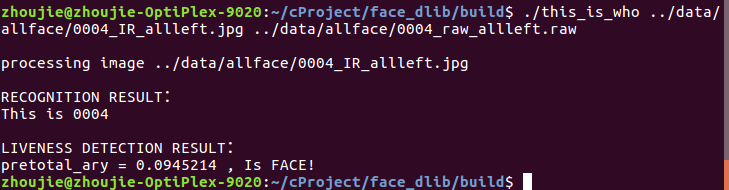
代码部分:
#train_candidate
1 |
|
#this_is_who_kinect_one.cpp
1 |
|
#this_is_who.cpp
1 |
|
代码比较粗糙,应该以后也不会再改了……